Linear Regression
Linear regression
Univariate: single feature $x\in R$
Multivariate: multiple features $\boldsymbol{x}\in R^m$
Linear Transformation: $\widetilde{y}=\boldsymbol{w^Tx}$
Loss: measures the difference between the prediction and the ground truth
Training: to optimize(i.e. minimize) the loss w.r.t parameters($\boldsymbol{w}$)
Gradient descent algorithm
minimize the target loss iterately, for each iteration:
conpute the gradient of average loss
- for single feature multiple examples:
- for multiple features one single instance:
- for multiple features multiple examples:
update parameter in the opposite of the gradient direction: $\boldsymbol{w}=\boldsymbol{w}-\alpha\frac{\partial J}{\partial \boldsymbol{w}}$
- for single feature multiple examples:
- for multiple features one single instance:
- for multiple features multiple examples:
stop until paremeters converge or reach a certain number of iterations.
- $f(x)=g(x)+h(x)\quad\to\quad f’(x)=g’(x)+h’(x)$
- $f(x)=g(x)h(x)\quad\to\quad f’(x)=g’(x)h(x)+g(x)h’(x)$
- $f(x)=\frac{g(x)}{h(x)}\quad\to\quad f’(x)=\frac{g’(x)h(x)-g(x)h’(x)}{h(x)^2}$
- $f(x)=g(u),g(u)=h(x)\quad\to\quad f’(x)=g’(u)h’(x)$
Example:
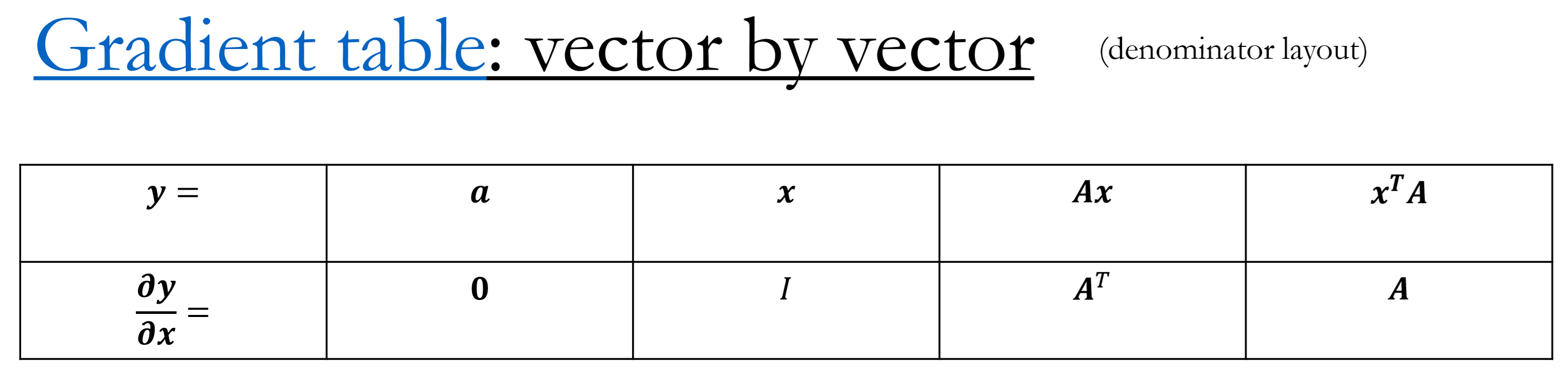
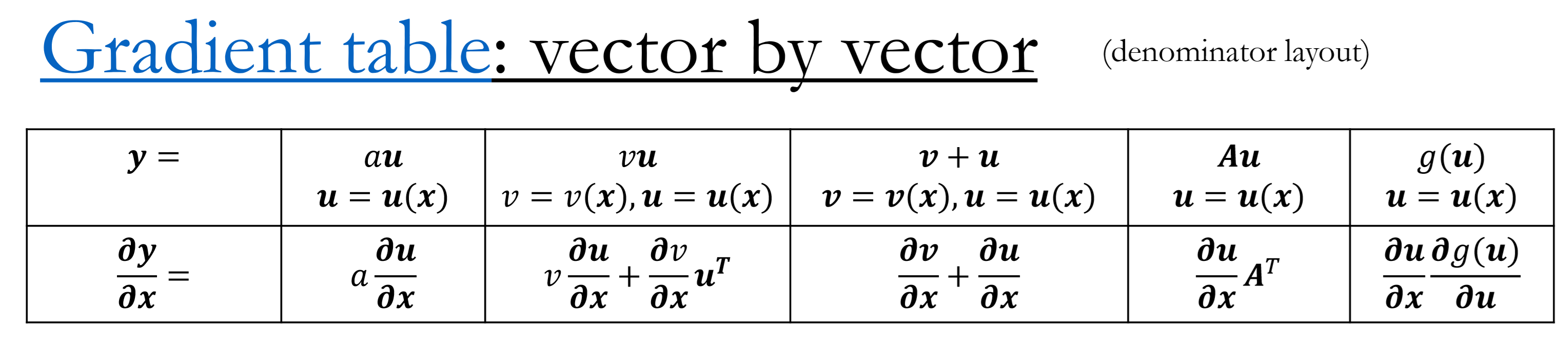
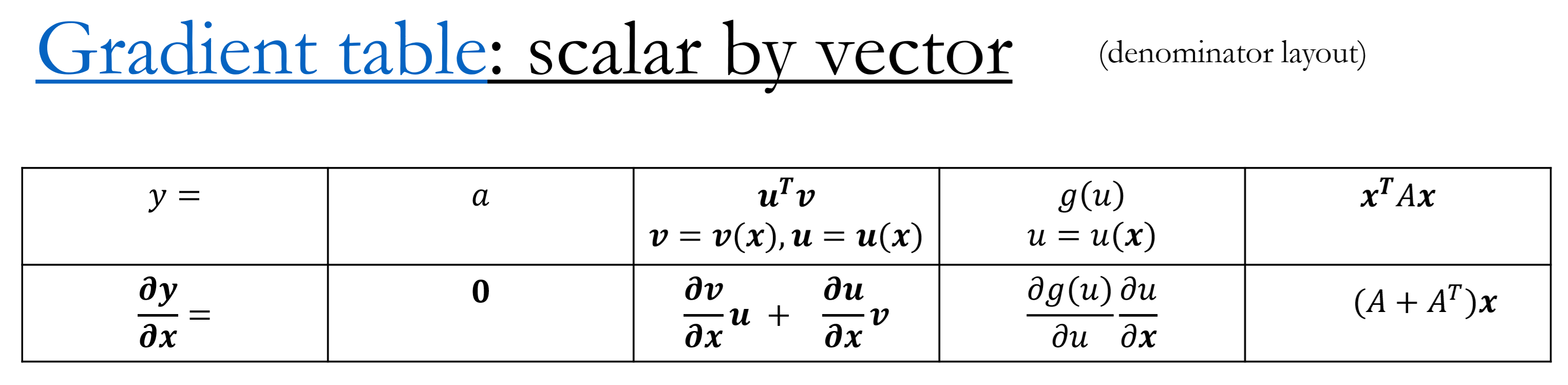
$y=(\mathbf{A}\boldsymbol{x})^T(2\boldsymbol{x+z})$ , $\mathbf{A}$ is a square matrix, $\boldsymbol{x}$ and $\boldsymbol{z}$ are vectors, y is a scalar, what is $\frac{\partial y}{\partial \boldsymbol{x}}$ ?
$L=\frac{1}{2}(\boldsymbol{w^Tx}-y)^2$, $\boldsymbol{x}=(1,2)^T$, $\boldsymbol{w}=(2,1)^T$, $y=0$, compute the gradient of $\frac{\partial L}{\partial \boldsymbol{w}}$
Classification
Logistic regression
From Linear regression to Logistic regression:
The function is not differentiable, therefore we use Logistic function as the probability:
$L2$ loss function:
thus the gradient is:
There exists gradient vanishing. In order to solve this problem, we use the binary cross entropy to compute the loss:
The gradient now is :
Multi-label classification
对第 $i$ 个类别有:
$z_i=\boldsymbol{W}_i\boldsymbol{x}+b_i\quad p_i=\sigma(z_i)\quad L_{ce}=-y_ilogp_i-(1-y_i)log(1-p_i)$
对于所有类别向量化表示为:
$\boldsymbol{z}=\boldsymbol{W}\boldsymbol{x}+\boldsymbol{b}\quad \boldsymbol{p}=\sigma(\boldsymbol{z})\quad L_{ce}=-\boldsymbol{y}^Tlog\boldsymbol{p}-(1-\boldsymbol{y})^Tlog(1-\boldsymbol{p})$
Softmax/multinomial classification
Multi-class single-label: classes are not independent, they are exclusive.
- Softmax function
- Cross-entropy loss
Detail:
$L=\frac{1}{2}(\sigma(\boldsymbol{w^Tx})-y)^2$
$L_{ce}=-ylogp-(1-y)log(1-p)\quad p=\sigma(z)$
$L_{ce}(\boldsymbol{x},\boldsymbol{y})=\sum_i-y_ilogp_i=-\boldsymbol{y^T}log\boldsymbol{p}$
From Shallow to Deep Neural Network
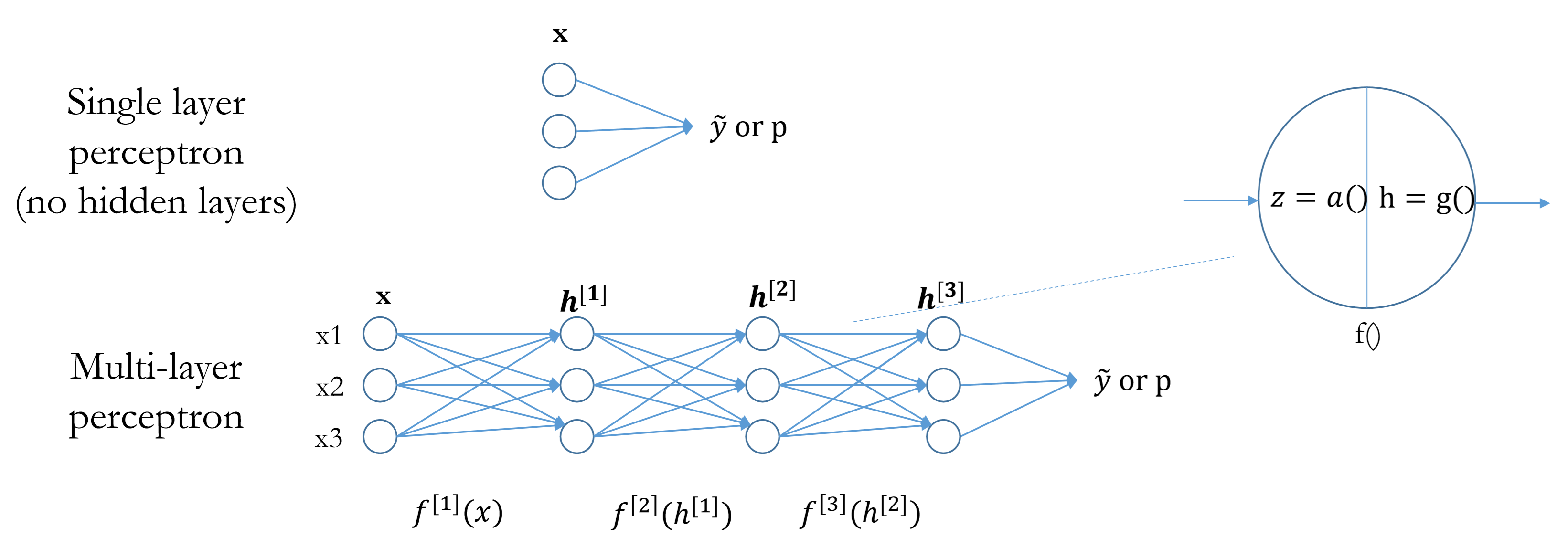
MLP
A net with multiple layers that transform input features into hidden features and then make predictions .
- At least one non-linear hidden layer
- A linear function is always followed by a non-linear function
Chain Rule
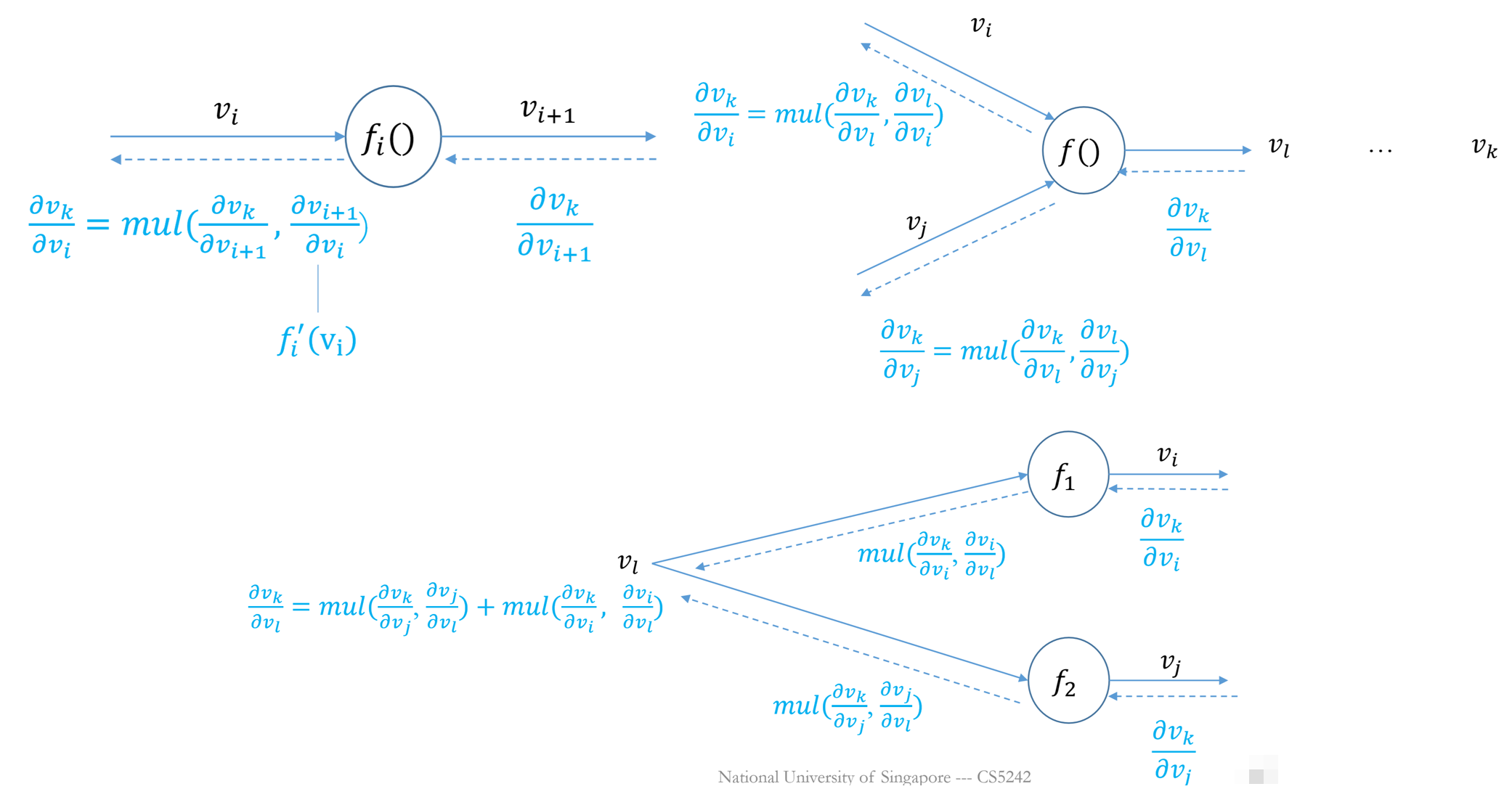
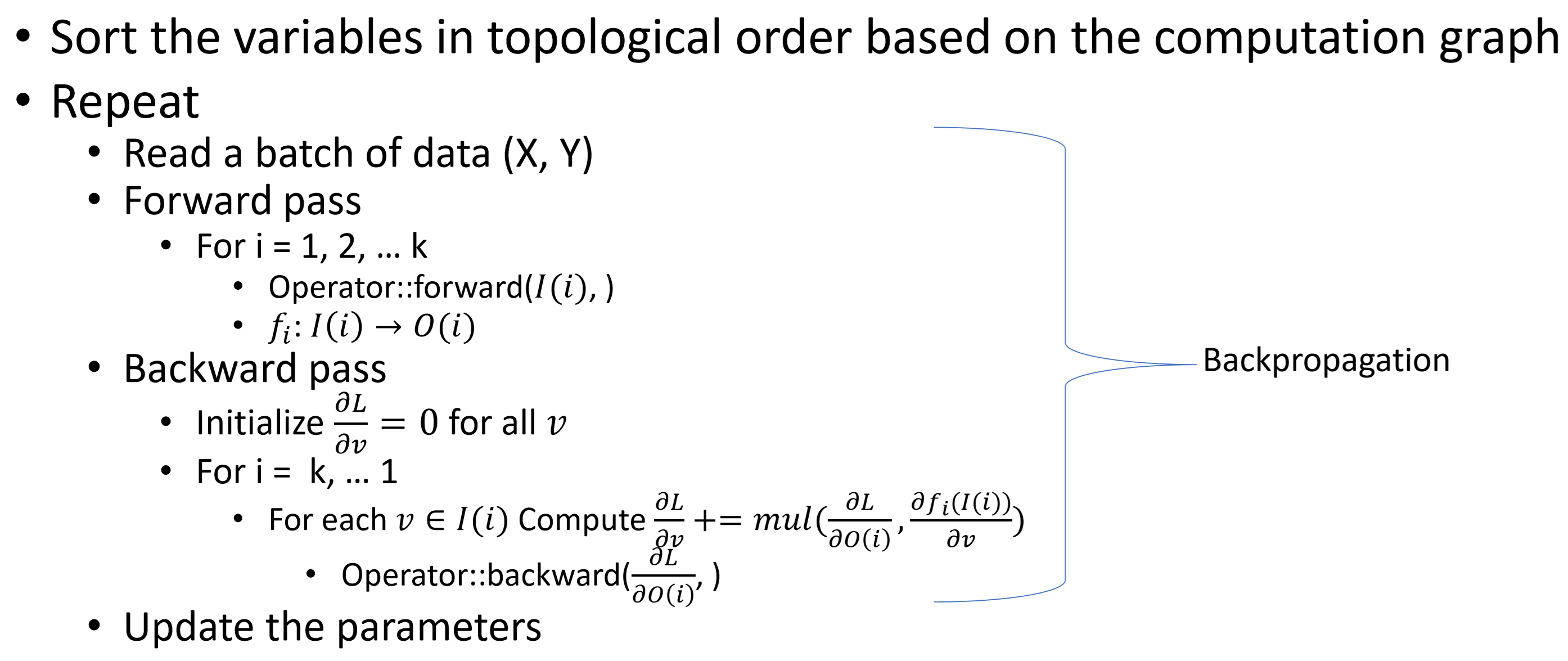
Backpropagation
Add bias
$\boldsymbol{A}\in R^{m\times n}\quad b\in R^{1\times n}$
Forward($\boldsymbol{A},b$): $\boldsymbol{C}=\boldsymbol{A}+b$
Backward($d\boldsymbol{C},\boldsymbol{A},b$): $d\boldsymbol{A}=d\boldsymbol{C}\quad db=1^Td\boldsymbol{C}$Array and scalar multiplication
$\boldsymbol{v}$ is an array, $k$ is a scalar(usually hyperparameter)
Forward($\boldsymbol{v},k$): $\boldsymbol{c}=k\boldsymbol{v}$
Backward($d\boldsymbol{c},\boldsymbol{v},k$): $d\boldsymbol{v}=kd\boldsymbol{c}$Matmul matrix multiplication operation
$\boldsymbol{A}\in R^{m\times k}\quad \boldsymbol{B}\in R^{k\times n}$ (including matrix with a single column or row)
Forward($\boldsymbol{A},\boldsymbol{B}$):$\boldsymbol{C=A\cdot B^T}\in R^{m\times n}$
Backward($d\boldsymbol{C},\boldsymbol{A},\boldsymbol{B}$): $d\boldsymbol{A}=d\boldsymbol{C}\cdot \boldsymbol{B^T}\quad d\boldsymbol{B}=\boldsymbol{A^T}\cdot d\boldsymbol{C}$Logistic operation
$a$ is an array of any shape
Forward($a$): $b=\sigma(a)$
Backward($db,a$): $da=db\times b\times (1-b)$Softmax-Cross-entropy operation
Forward($\boldsymbol{Z},\boldsymbol{P}$): $\boldsymbol{P}=softmax(\boldsymbol{Z})\quad L=\frac{1}{m}sum(-YlogP) $
Backward($\boldsymbol{Z},\boldsymbol{P}$): $d\boldsymbol{Z}=\frac{1}{m}(\boldsymbol{P}-\boldsymbol{Y})$
Training Deep Networks
Mini-batch stochastic gradient descent (SGD)
• Reduces the chance of local optimal points and saddle points from GD
• More stable and smooth than standard SGD
• Extensions: Momentum, RMSProp, Adam
- Smooth the gradients by preserving historical gradients
- Adaptive learning rate per parameter
Momentum:
RMSprop:
Adam:
Tricks
- Learning rate decay: start large and decrease gradually
- Randomly initialize parameters: break symmetry
and avoid gradient vanishing / exploding - Data normalization
Overfitting and underfitting
- Underfitting means high bias, Overfitting means high variance.
- Regularization: Early stop and L2 Norm.
- Model capacity: the ability for the model to fit different functions or datasets; with more unconstrained parameters, the model can fit more functions and datasets.
- Hyper-parameter tuning:
- Tune parameters using training data.
- Tune hyper-parameters using validation data.
- Report model performance using test data.
Convolution and Pooling
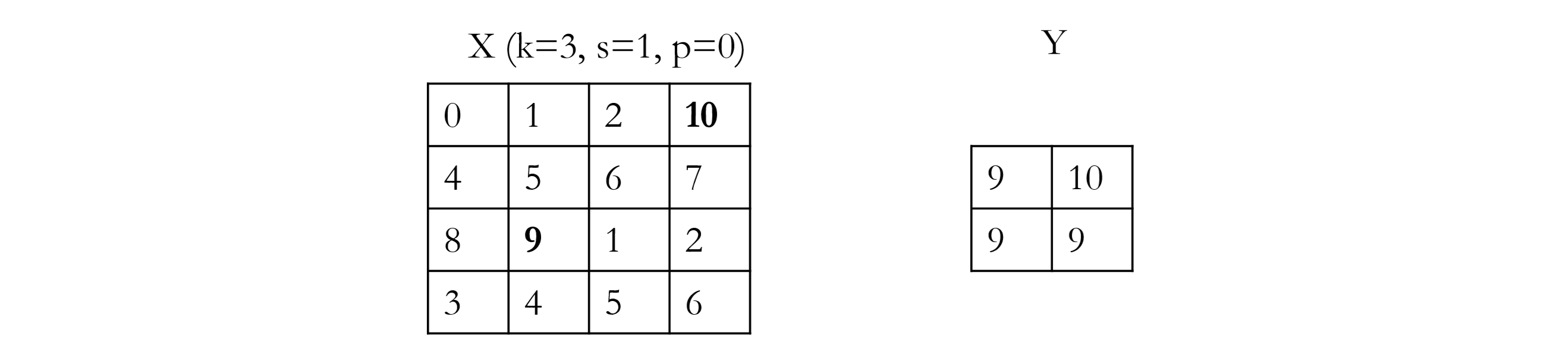
2D Convolution
Convolution is an affine transformation.
Each receptive field generates aone output value: sparse connection
# kernels = # output feature maps
Output size: $(c_0,o_h,o_w)=(c_o,\lfloor\frac{n_h+p_h-k_h}{s_h}\rfloor+1,\lfloor\frac{n_w+p_w-k_w}{s_w}\rfloor+1)$
Share the same parameters across different locations: reduce parameter, location invariant,
Implementation: Receptive fields across feature maps are concatenated into to one column.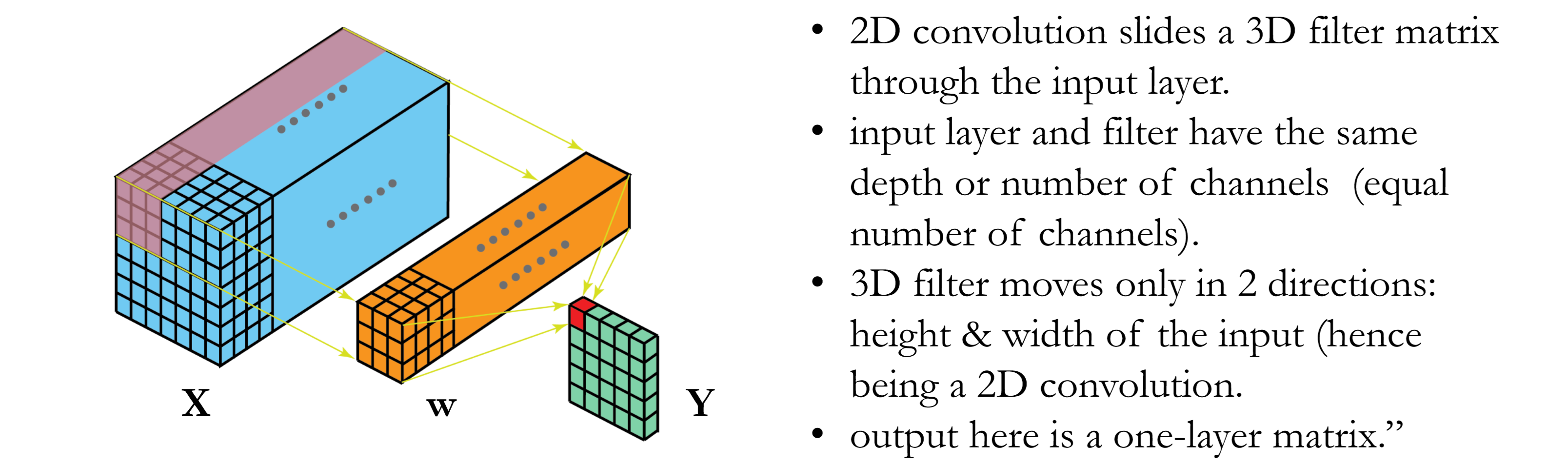
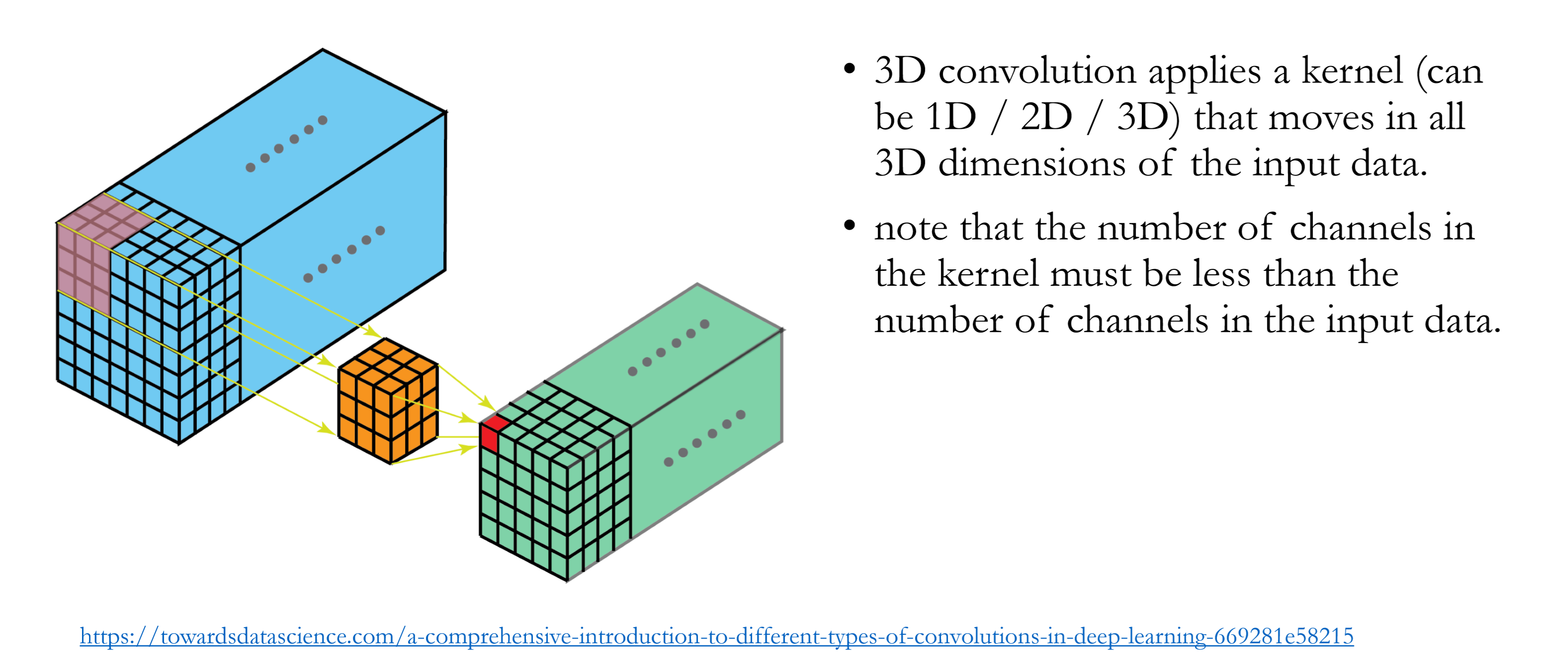
3D Convolution
Average & max pooling
- Aggregate the information from each receptive field.
- The output is invariant to some variations of the input. eg. rotation.
- Stride is usually > 1 to reduce dimensionality
- Pooling is applied to each channel / feature map separately
- Information will be lost from pooling but local “useful” information remains.
- We don’t need to keep as many features as possible because we want to derive higher levels of abstraction. e.g. from simple edges to parts of objects
ConvNet Architecture
Neocognitron
- Hierarchical Feature Extraction + Multi-Layer + Hand-crafted weights.
LeNet 1-5
- Small CNN with convolution + pooling (subsampling)
AlexNet
- GPUs (instead of CPUS): Fast training
- Ensemble modelling
- ReLU: Reduce the chance of gradient vanishing
- Dropout: Multiple the outputs (h) with scale 1/(1-p); Regularization (Similar to L2 norm)
- Image augmentation: Done on-the-fly during training, so no need to store entire (augmented) dataset and occupy memory. Random operation for training; No random operations during test, Make predictions by aggregating the results from all augmented images.(Voting)
VGG
- Uniform kernel size
- Consecutive convolution layers
InceptionNetV1
- Parallel paths: inception block (1x1 convolution), insert the 1x1 convolution layer with a small number of kernels to fuse the channels from the input tensor and reduce the computational cost for the next convolution
- Complexity optimization
- Average pooling: Reduce model size (less overfitting); Reduce time complexity
- New image augmentation methods
InceptionNetV2
- Batch Normalization
Computes the mean and variance over mini-batch samples’s features.
Normalize every neuron of each sample.
Applied after linear transformations and before activation.
(z = relu(BN(conv/ fc(x))) or z = BN(relu(conv/ fc)))
Accumulates the mean and variance from every batch during training, and then apply them during test
InceptionNetV3
- Spatially separable convolutions(Factorization of the kernel): Reduce computation cost $\to$ train faster ( 7x7 == 1x7 and 7x1 (receptive field))
- Label smoothing: prevents network from becoming over-confident and optimizing towards values that cannot be achieved
ResNet
- Skip/Residual-connection: Reduct gradient vanishing.
XceptionNet
- Depth-wise spatial convolution: 2D Convolution applied to each channel independently; Number of input channels = number of kernels = number of output channels: $c_i=c_o$, Each kernel has a single channel
- Pointwise convolution: Normal 2D convolution with kernel height and width: 1x1
Neural Architecture Search (NAS)
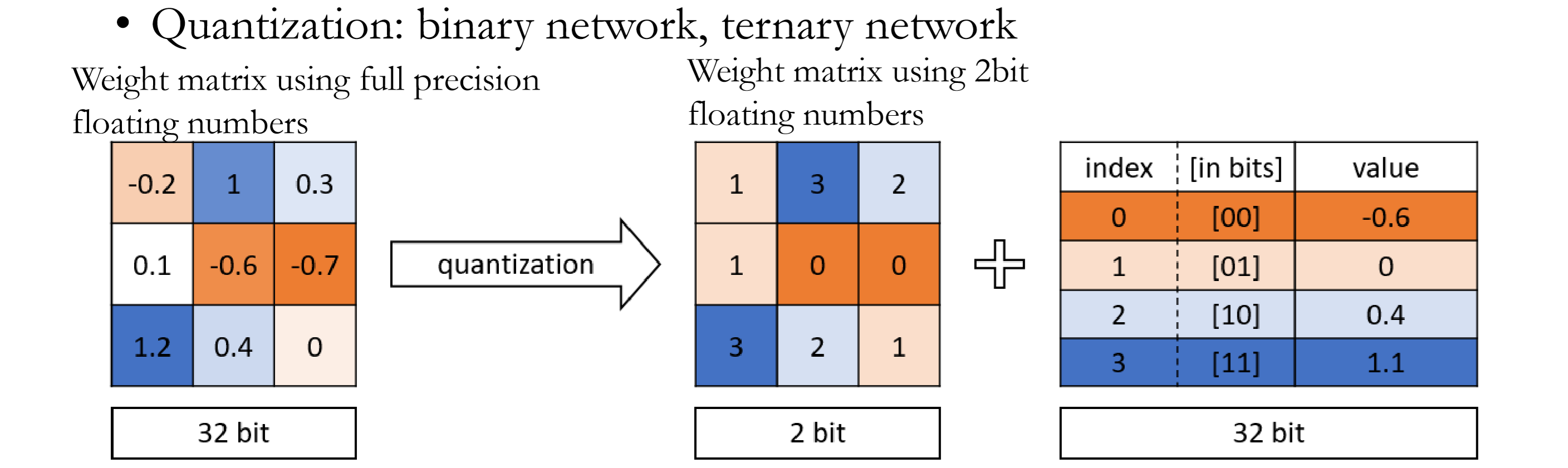
- Model Compression: Prune layers, Low-precision representation
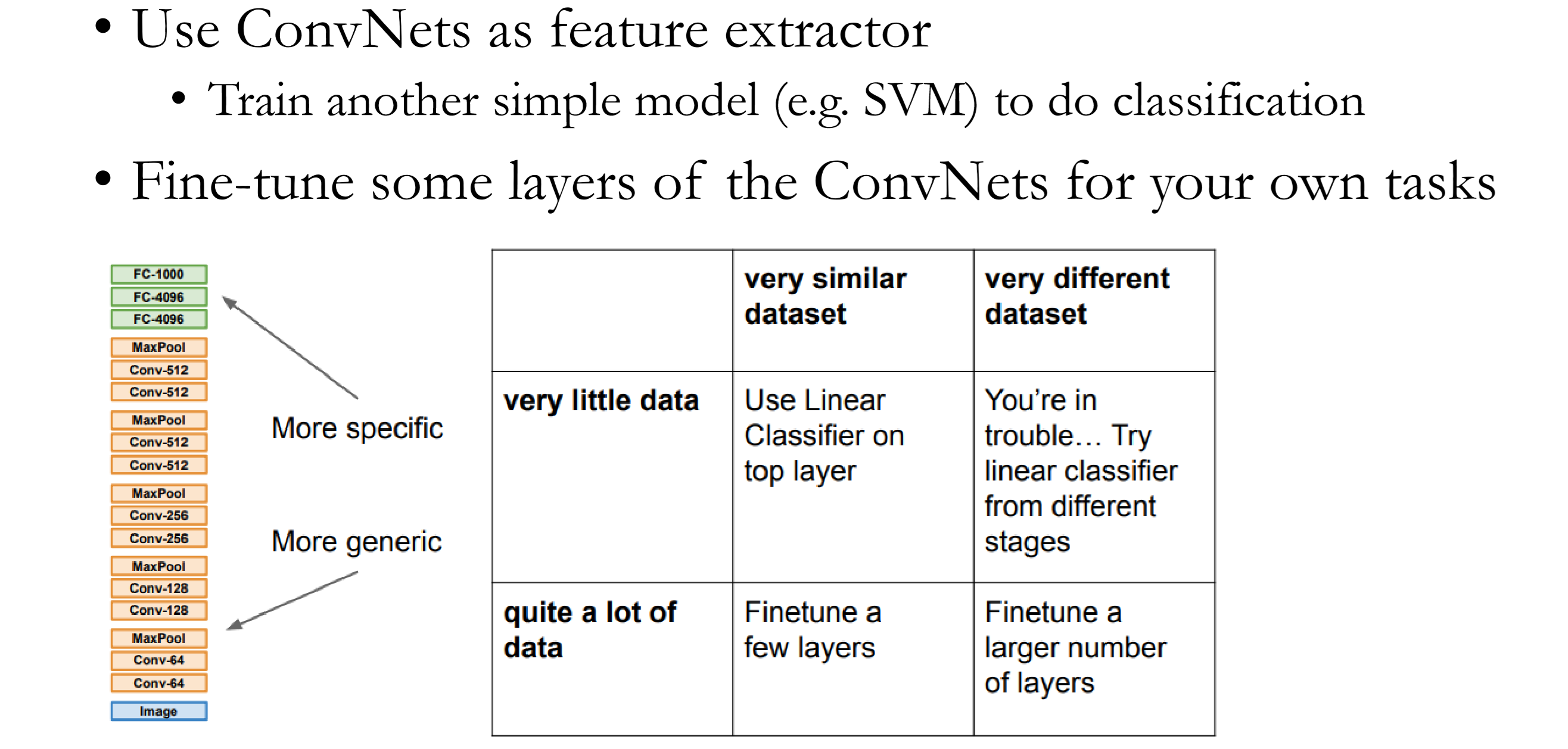
Transfer Learning with DCNN
- Train model (or use someone else’s model) on ImageNet 2012 training set
- Re-train classifier on new dataset //Just the top layer (softmax or SVM)
- Classify test set of new dataset