Convolution
Convolution is a linear transformation and the output is the feature of the input.
- 1D: text processing
- 2D: image processing
- 3D: 3D data, CT, microscopy, etc
mD: m dimensions where the kernel is shifted
1D convulution
This operation is actually cross-correlation, but we call it convolution.
$\boldsymbol{w}$: kernel/filter, length: k
$\boldsymbol{x}$: input, length: n
$\boldsymbol{y_t}$: the output feature, length: o
The area of input data where a kernel applied is called the receptive field, each receptive field is corresponding to a single output feature $\boldsymbol{y_t}$, which means, every time the kernel is shifted, there’s a new output $\boldsymbol{y_t}$.
Every cell of vector $\boldsymbol{w}$ is a parameter to be learned. In the 1D convolution below, Every output is generated from 3 input data x and these 3 cells is called a receptive field. We move the kernel along the input data until we cannot move further.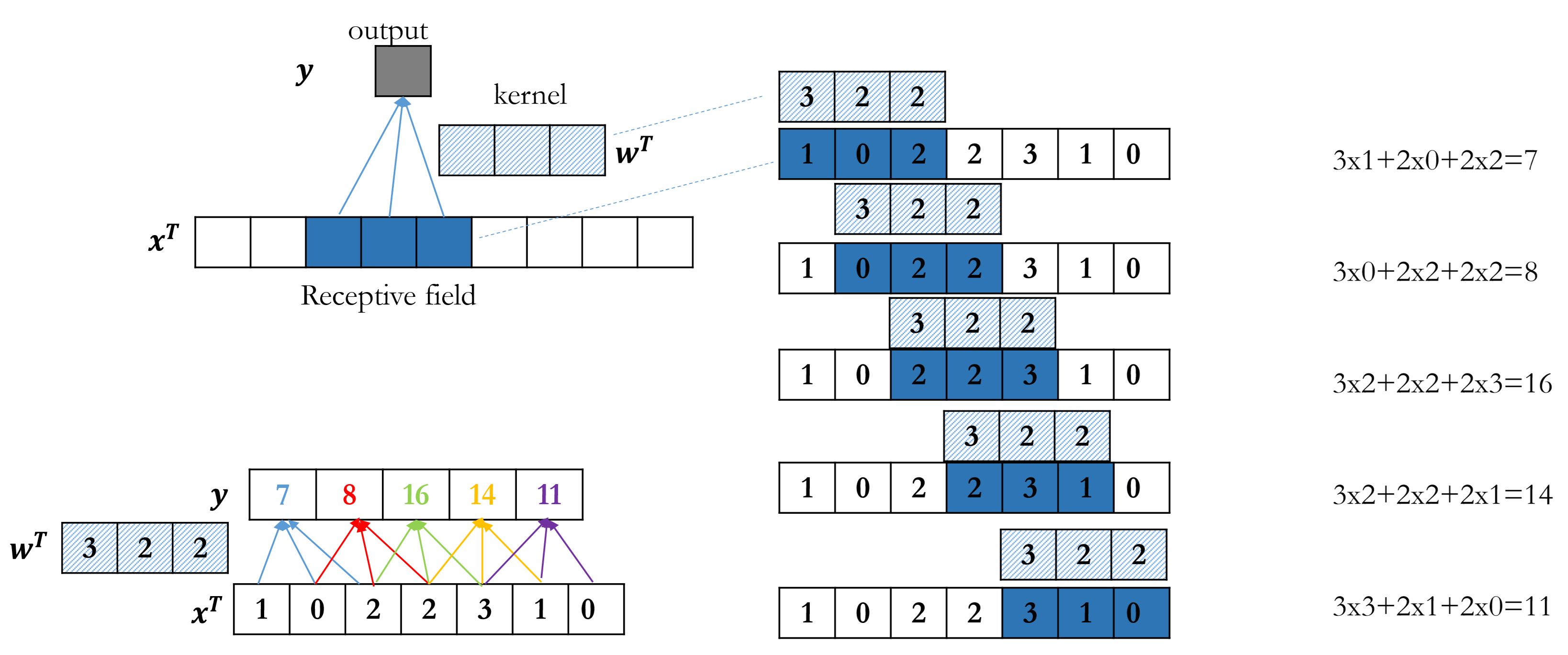
Benefits of Convolution
Sparse connections
Each output is only connected to the receptive field instead of the whole input data(fully-connected) $\to$ fewer parameter and less overfittingWeight sharing
Regularization
Less overfittingLocation invariant
Make the same prediction no matter where the object is in the image. (the same values of receptive field lead to the same output regradless of the place of the receptive field)
Perceptron, MLP and Convolution

Padding
When stride = 1:
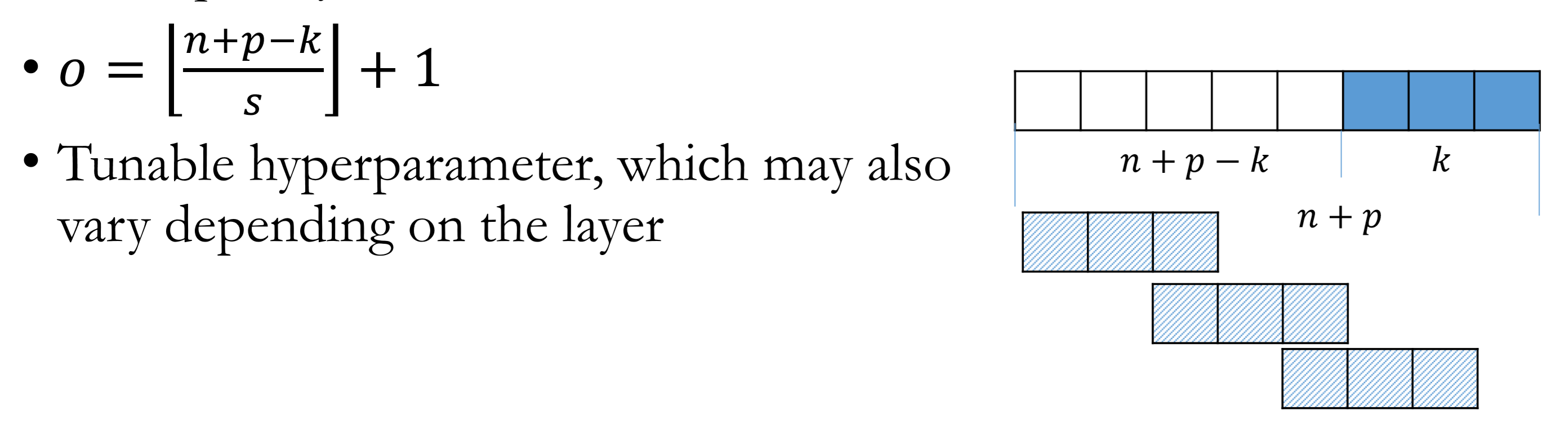
$o$ : output length $\quad n$ : input length $\quad k$ : kernel length $\quad p$ : padding length
$p = 0\to$ valid padding $\qquad p=k-1\to$ same padding ( left: $p/2$, right: $p/2$ ).
$p$ can be set manually or automatically.
Pad with 0 for convenience.
Stride
Stride: how many steps to move towards the next receptive field.
Larger stride sizes skip more elements, effective receptive field size increases quickly, one output contains larger range of information of deeper lever.
Meanwhile increasing the stride is computationally faster, since we compute less convolution.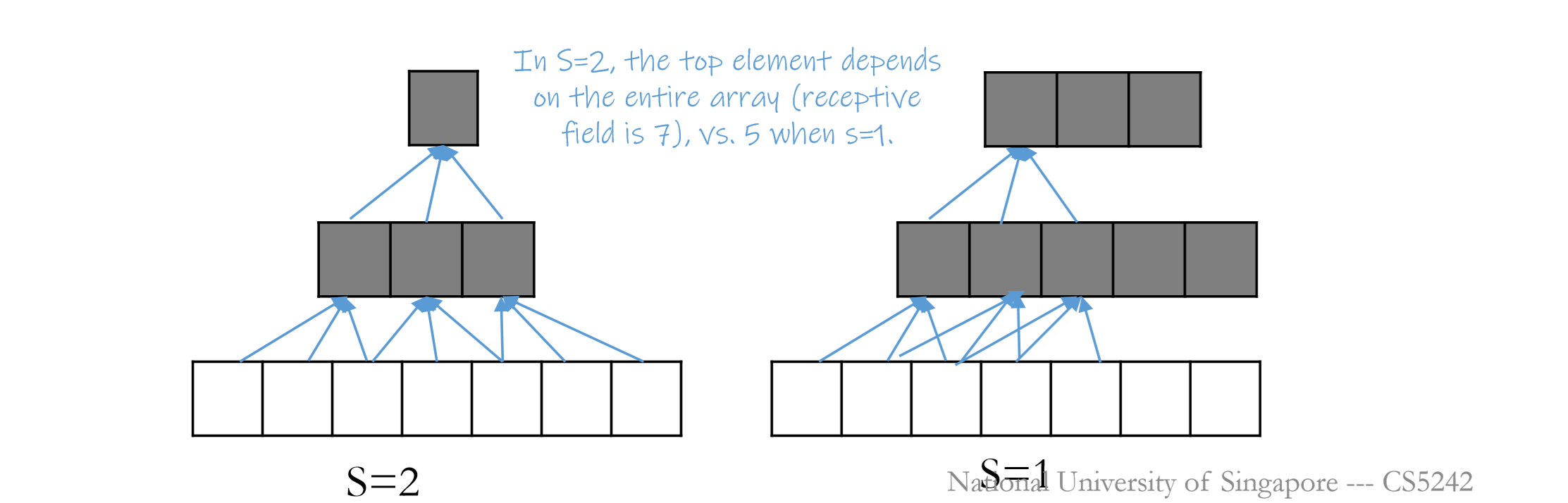
When stride > 1, output length cannot be equal to the input length.
“same” is defined as:
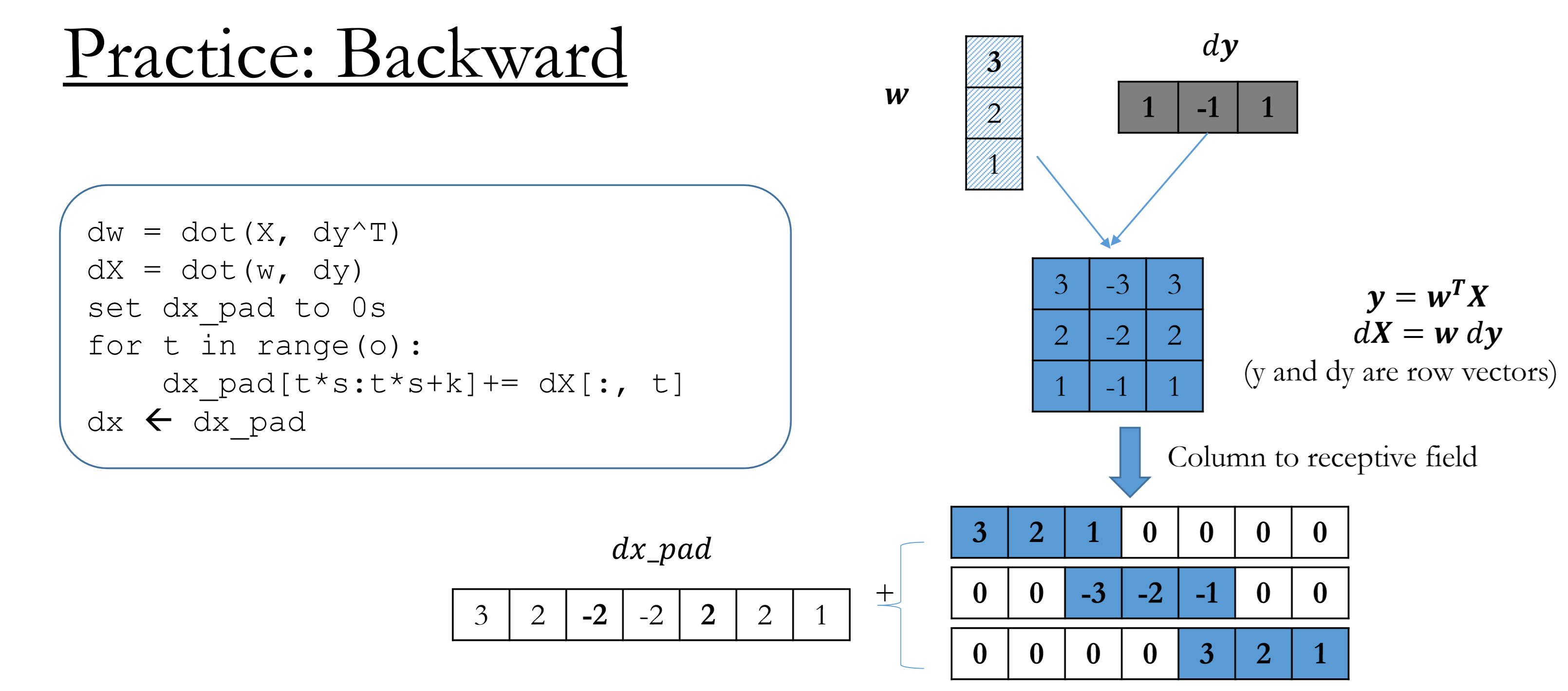
Conv1D: forward & backward
Convert each receptive field to a column.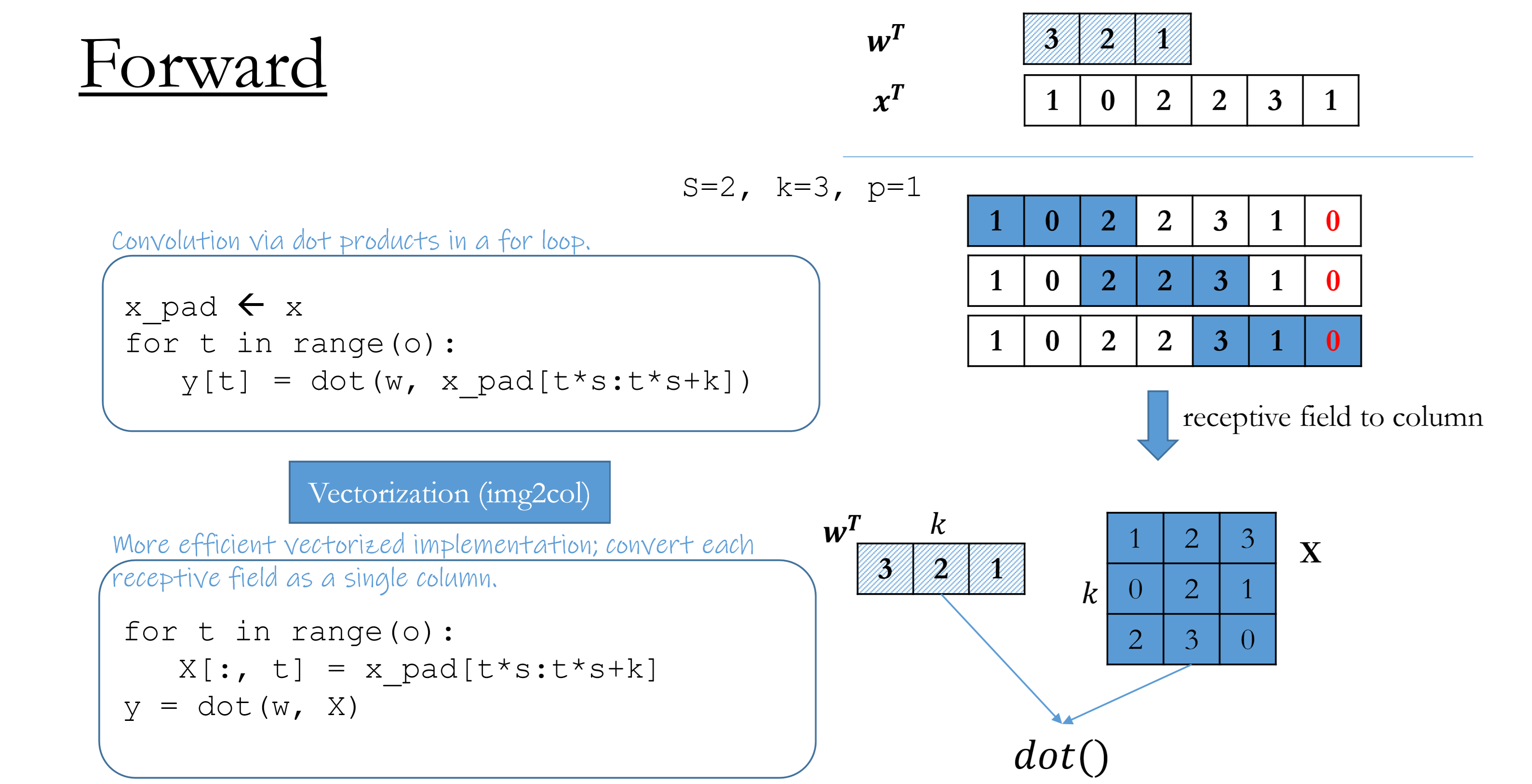
2D Convolution
Kernels move from left to right, from top to the bottom. (2 directions)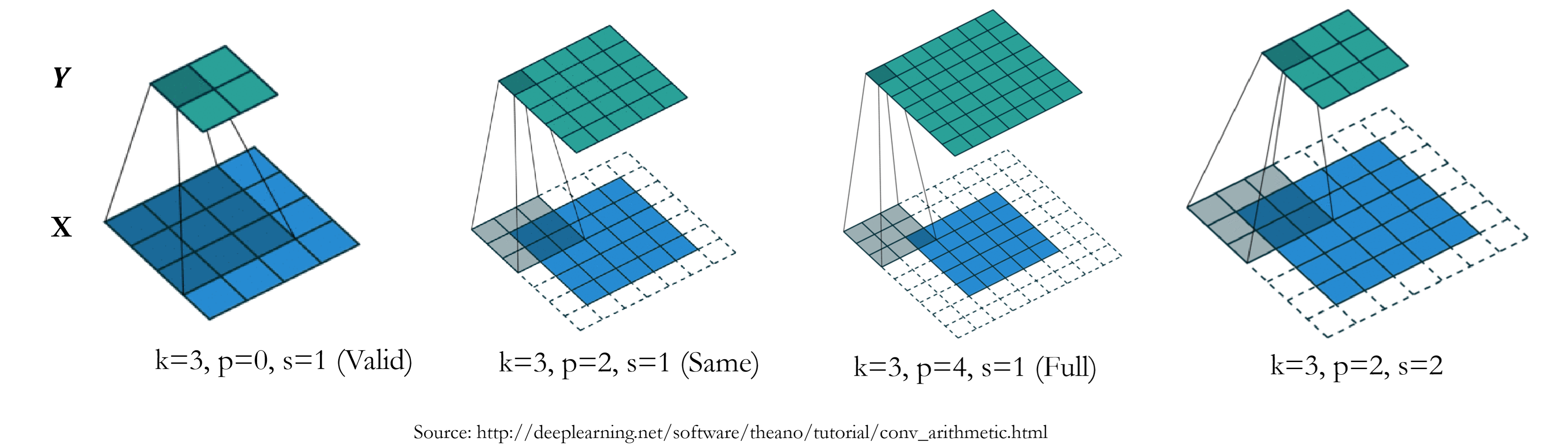
Single channel, single kernel
Convert each receptive field to a column.
Input $\mathbf{X}$ : $(n_h, n_w)$
Kernel $\mathbf{W}$ : $(k_h, k_w)$
Output $\mathbf{Y}$ : $(o_h, o_w)= (\lfloor\frac{n_h+p_h-k_h}{s_h}\rfloor+1,\lfloor\frac{n_w+p_w-k_w}{s_w}\rfloor+1)$
Computation cost: $O(k_h\times k_w\times o_h\times o_w)$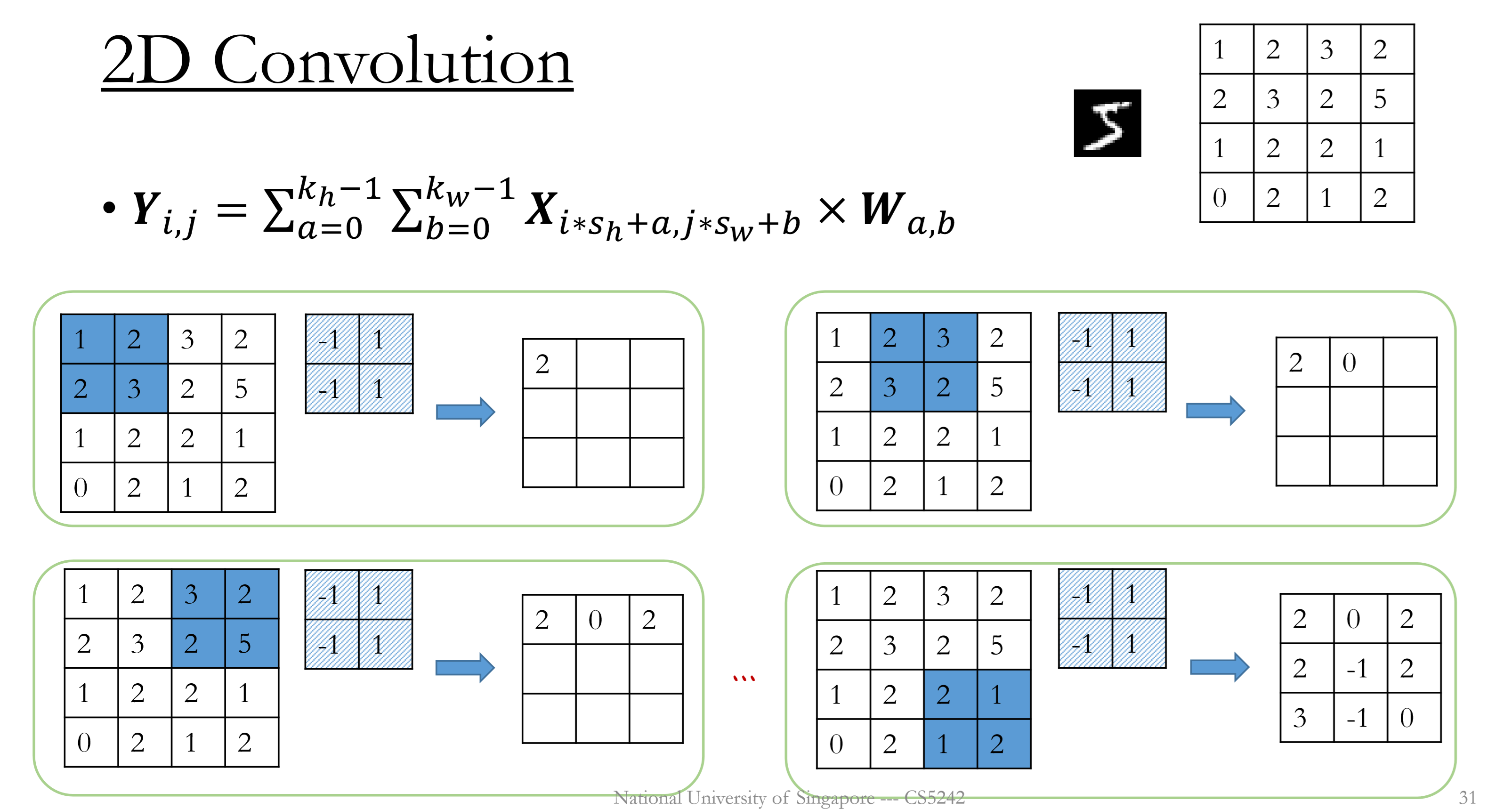
Single channel, multiple( $c_o$ ) kernels
Applying multiple kernels (filters) $c_o$, all of the same stride and padding.
Convert each receptive field and each kernel to a column.
Parameter size: $c_o\times k_h\times k_w$
Output shape: $(c_0,o_h,o_w)=(c_o,\lfloor\frac{n_h+p_h-k_h}{s_h}\rfloor+1,\lfloor\frac{n_w+p_w-k_w}{s_w}\rfloor+1)$
Computation cost: $O((c_o\times k_h\times k_w)\times (o_h\times o_w))$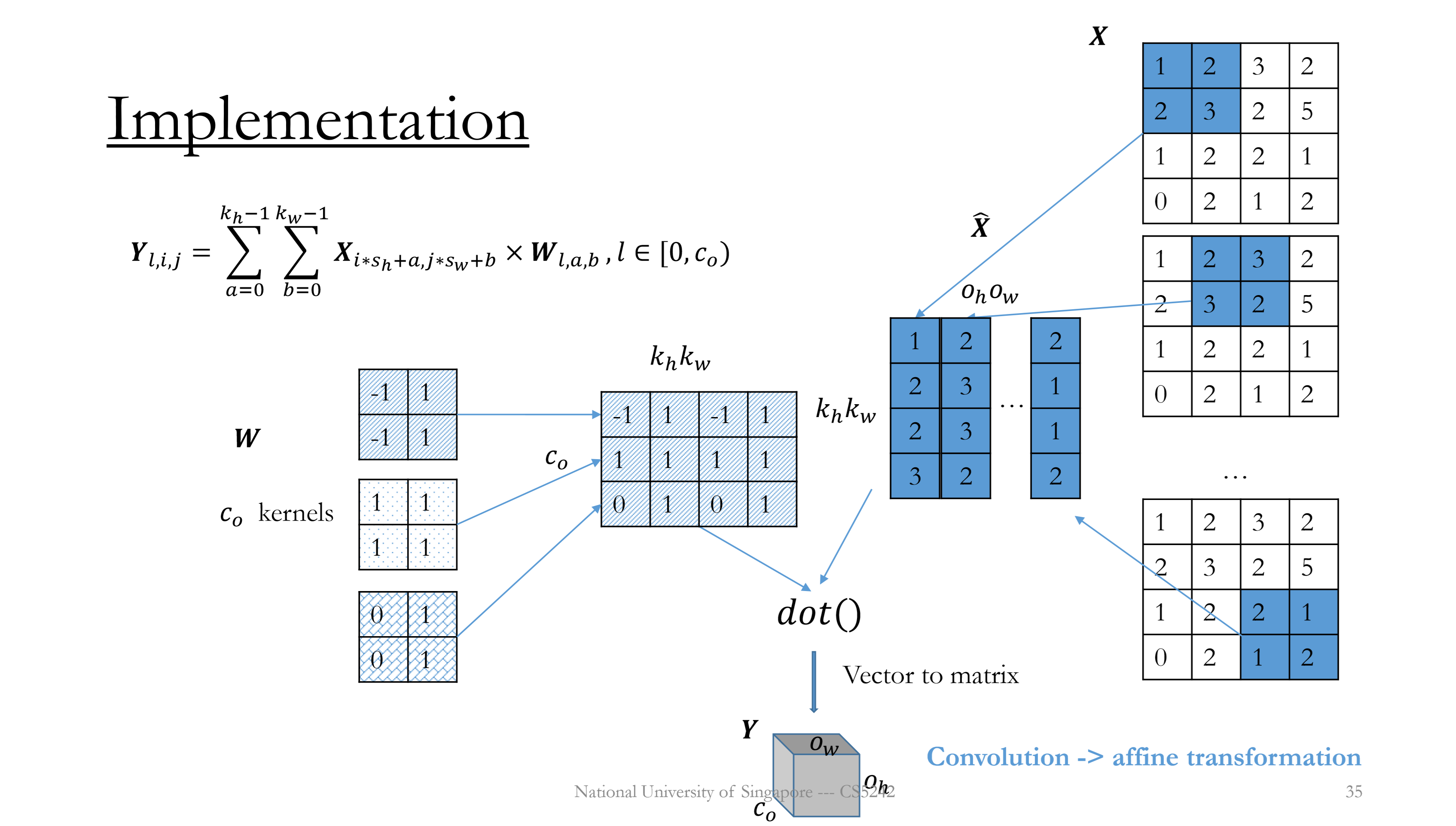
Multiple( $c_i$ ) channels, multiple( $c_o$ ) kernels
Slide the window from left to right, top to bottom.
Receptive fields across feature maps are concatenated into to one column.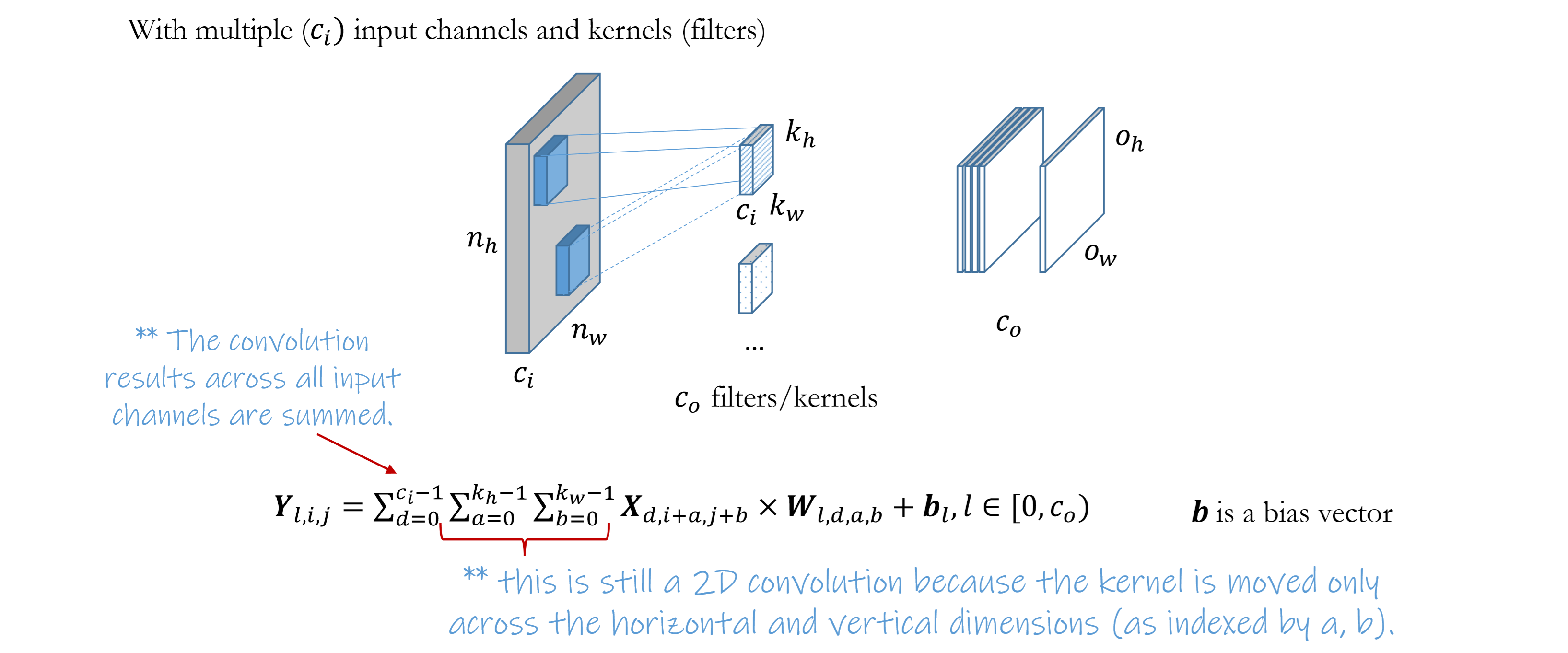
- Forward
Convert $\mathbf{X}$ into $\mathbf{\hat{X}}$ of size $(c_ik_hk_w\times o_ho_w)$
Reshape $\mathbf{W}$ into $(c_0\times c_ik_hk_w)$
$\mathbf{Y}=\mathbf{W\hat{X}}+\boldsymbol{b}$
Output shape: $(c_0,o_h,o_w)=(c_o,\lfloor\frac{n_h+p_h-k_h}{s_h}\rfloor+1,\lfloor\frac{n_w+p_w-k_w}{s_w}\rfloor+1)$
Computational cost: $O(c_o\times c_ik_hk_w\times o_h o_w)$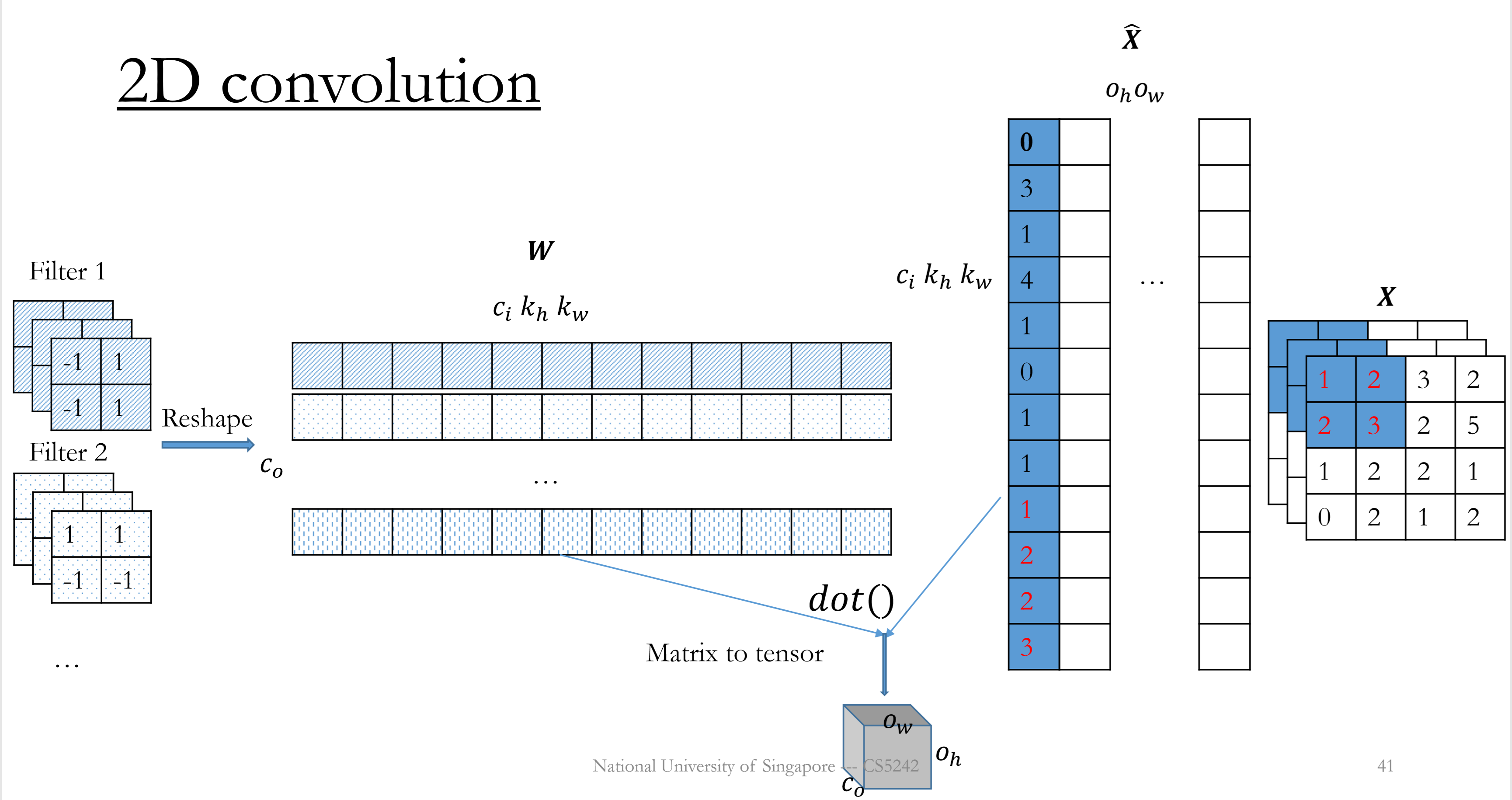
- Backward
Given $\frac{\partial L}{\partial \mathbf{Y}}$
Compute $\frac{\partial L}{\partial \mathbf{W}}=\frac{\partial L}{\partial \mathbf{Y}}\mathbf{\hat{X}}^T\quad \frac{\partial L}{\partial \mathbf{\hat{X}}}=\mathbf{W}^T\frac{\partial L}{\partial \mathbf{Y}}$
Column to receptive field transformation to get gradient w.r.t original $\mathbf{X}$
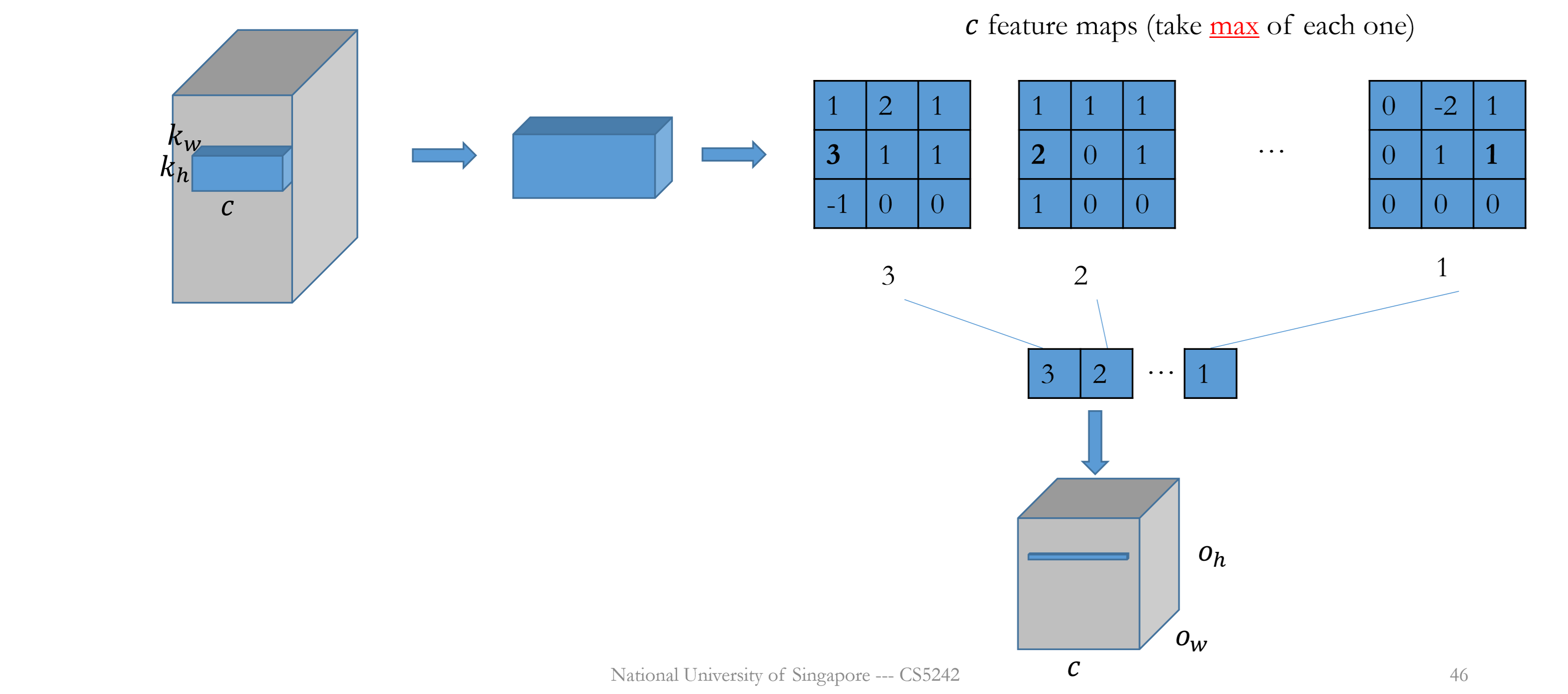
Pooling
No parameter, applied to each channel respectively.
Padding and stride can be applied.
# input channels = # output channels
i.e., $c_i=c_o=c$
Max pooling
Average pooling

Effect of pooling
Reduce the feature size and model size
Max pooling: invariant to rotation of the input image
Average pooling: is usually skipped, can be replaced by convolution (sum of weighted input); much cheaper(no weights)