Stochastic Gradient Descent
Various GD’s problems and advantages
- Forward computer the average loss among:
- all training samples (GD)
- randomly pick a single training sample (SGD)
- randomly pick b training samples (mini-batch SGD)
- Backword compute the gradient of each parameter
- Update every parameter according to its gradient
Problems of GD:
- local optimum: stop updating when every parameter is at its local optimum. (This is a rare case)
- saddle point: we may not even arrive at a local optimum.
- Efficiency: has to load all data to compute the update, with high memory cost and high computation cost per iteration.
Advantage of SGD:
- more efficient in terms of memory cost and speed per iteration.
- avoid local optimum efficiently: although $\frac{\partial J^{(k)}}{\partial w}=0$ , $\frac{\partial J^{(i)}}{\partial w}$ (i != k) may not be zero.
Problems of SGD:
- not moving in the optimal direction for every step due to the stochastic process(minimizing loss for a single example but not for the whole training dataset and may not converge at all).
Advantages of mini-batch SGD:
- the derivation direction is more stable than SGD.
- Averaged on b samples, leading the faster convergence in terms of #iterations.
Efficiency compare:
- R for convergence rate: $R_{GD}>R_{mini-batch SGD}>R_{SGD}$
- T for time per iteration: $T_{GD}\leq T_{mini-batch SGD}\leq T_{SGD}$
- Tc for time to converage: $Tc=$#$\times T$ (number of iterations $\times$ time per iteration), it depends case by case. By experience, mini-batch SGD is the fastest to converge.
Batch Size
- larger batches are more accurate at estimating the gradient, better gradient does not equal to better performance due to the possibility of overfitting.
- GPU has limited memory, if all batch samples are processed in parallel, we should reduce batch size or use more GPU.
- Some hardware have better runtime with specific array sizes, e.g., for GPUs, powers of 2 are usually optimal.
- Training with small batch need small learning rate to reduce the noise and maintain stability due to the high variance in the estimated gradient, this trade-off may slow down the overall learning speed.
- Small batches act as regularizers with noisy approximated gradients.
- Using extreme small batches may cause the underutilization of multicore architectures and there is a fixed time cost below a certain batch size.
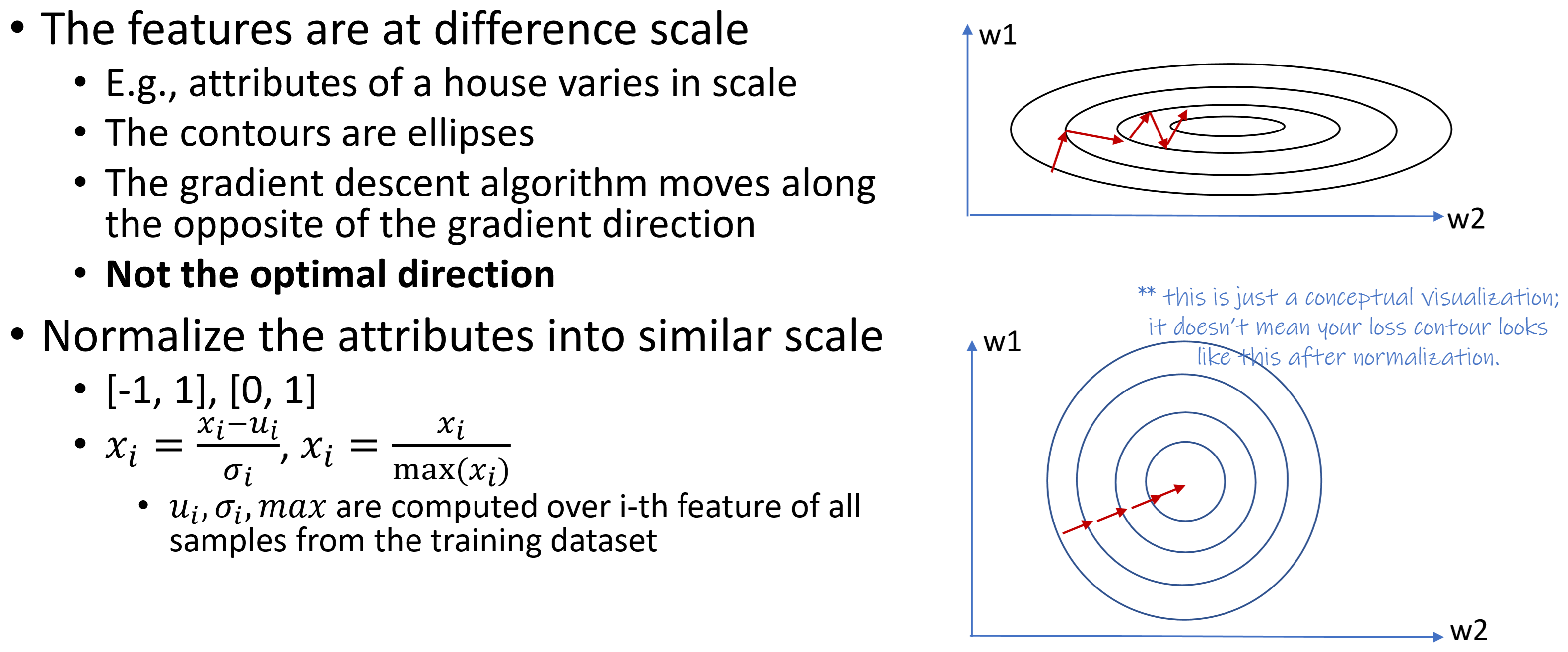
Loss Contour
Every point in the contour is a specific assignment of parameters, points on the same circle have the same loss value, points on the innermost circle have the minimum loss.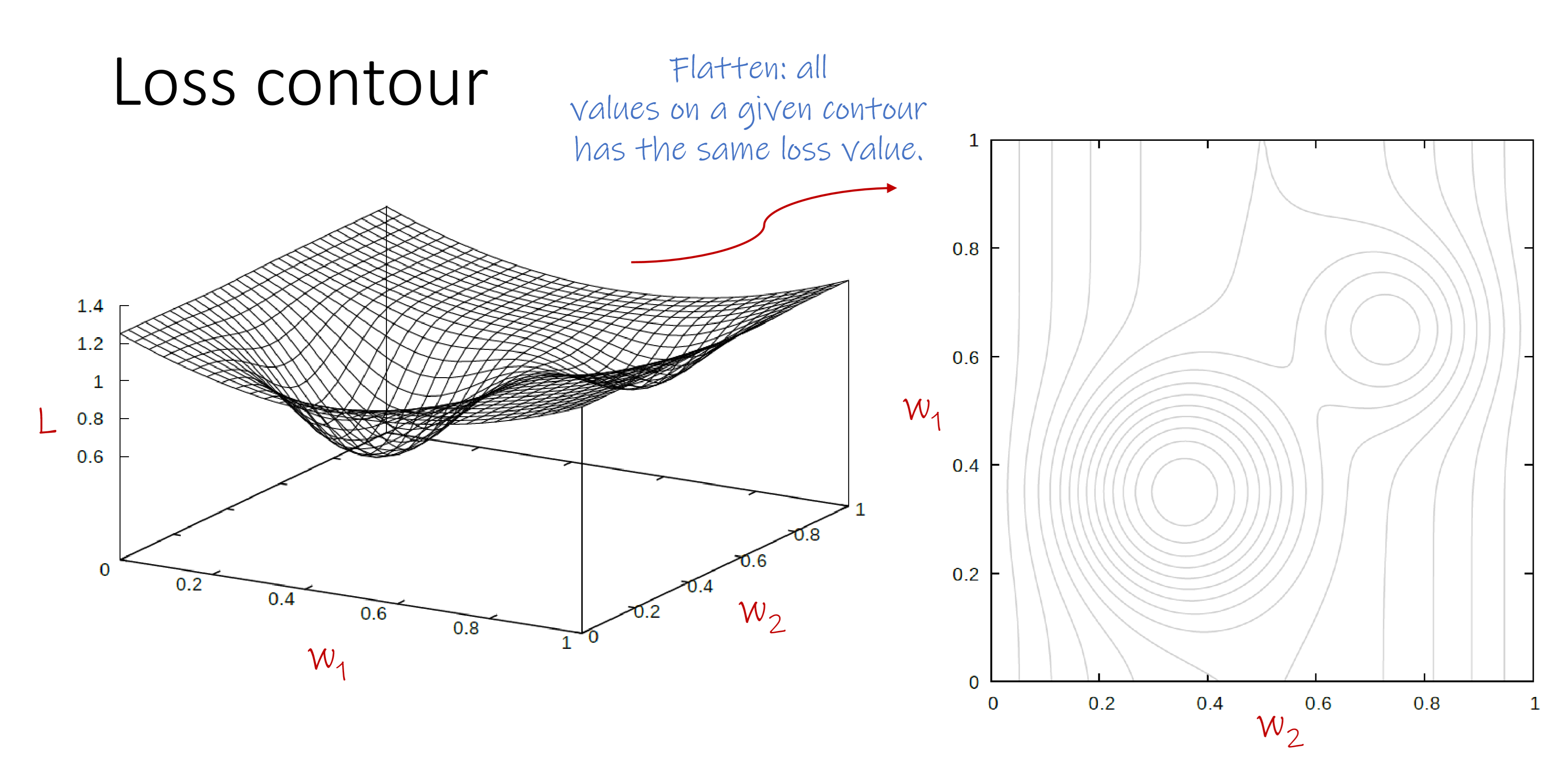
Evolution of mini-batch SGD
mini-batch SGD with momentum
Motivation:
- Gradients may dramatically change on a complex loss function.
- Hard to make progress on flat regions.
- Momentum smooths the gradients over past time, i.e., balance thes history and new gradient.
Algorithm:
Adagrad
Motivation:
- Different dimensions have different gradients.
- We want a larger lr for small gradients and small lr for large gradients.
- Adagrad makes learning rates adapt to each dimension.
Algorithm:
RMSprop
Motivation:
- Adagrad decays the learning rate that may lead slow progress at end.
- RMSprop guarantees that learning rate will not end up to 0 as time goes by.
Algorithm:
Adam
Motivation:
- Conbine the momentum and adapted learning rate to smooth the gradients and adapt to various dimensions.
Algorithm:
Adam offers fast convergence.
Mainly for the first few iterations, when t gets large, the denominator goes to 1.
Convergence
Usually, convergence is considered w.r.t the optimized variable, i.e. weights of the network.
- For learning, however, because we’re not really interested in finding the optimum but having a good model that will generalize, we are interested in convergence of the loss.
- Convergence then refers to the loss plateauing.
Training tricks
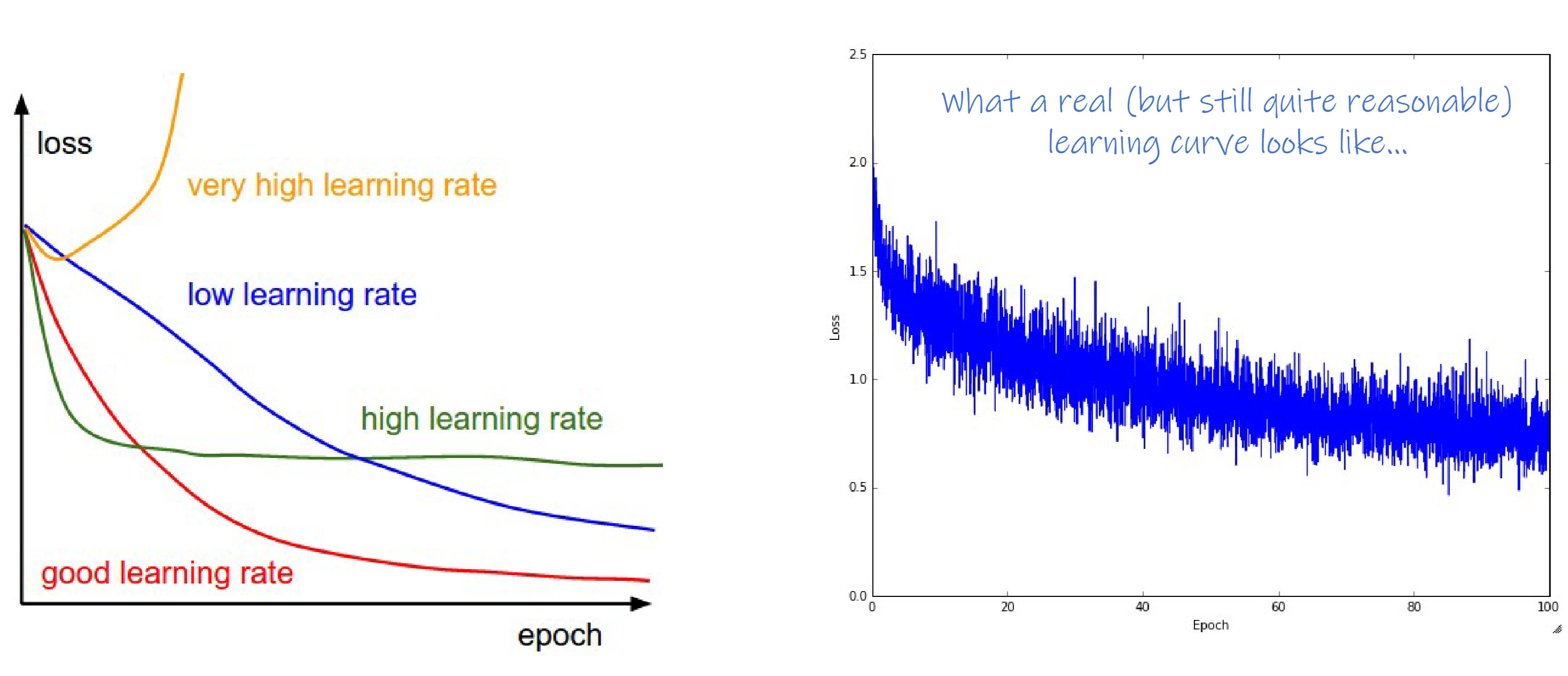
Learning Rate
Initialize lr with a large value and then decrease it gradually.
decay learning rate:
- step
- 1/t
- exponential $\alpha e^{-kt}$
Random parameter initialization
We want each unit to compute a different function and we do not want redundant parameters.
Random initializations can break symmetry.
- Gaussian, N(0, 0.01)
- Uniform, U(-0.05, 0.05)
- Glorot/Xavier : Gaussian N(0, sqrt(2/(fan_in+ fan_out))
- He/MSRA : Gaussian N(0, sqrt(2/fan_in))
General idea: keep variance of random values within some reasonable range. We want various parameters have the same scale/range.
- Too small variance: Z vanishing (Z = X W + b,)
- Too large variance: Z exploding
For bias vector: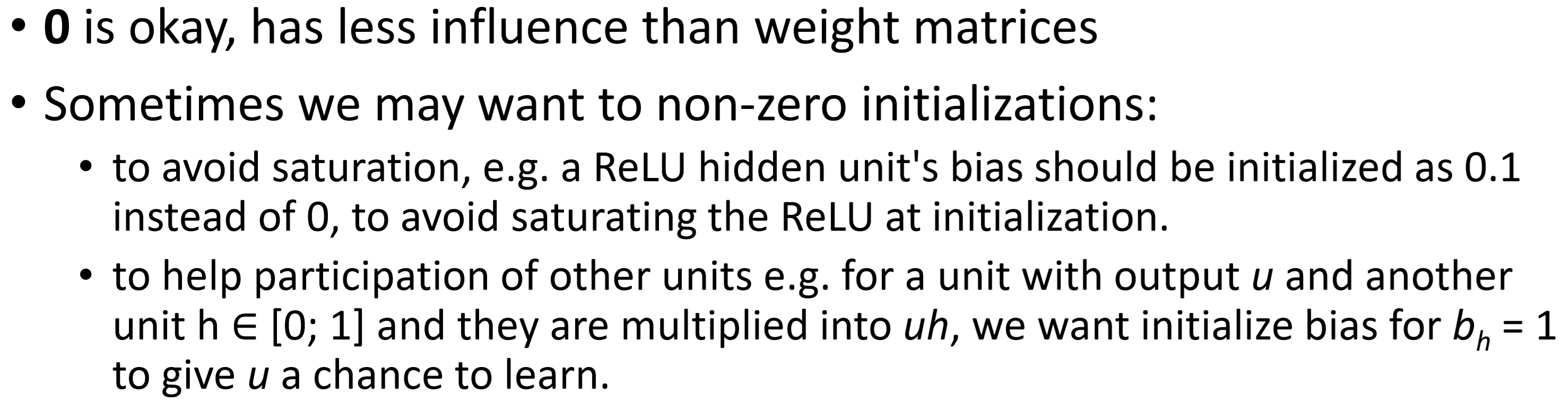
Data normalization
Overfitting and Underfitting
Underfitting
Low model capacity / complexity $\to$ model too simple to fit training data
High bias
- definition of bias (error): An algorithm’s tendency to consistently learn wrong things by not taking into account sufficient information found in the data
Overfitting
High capacity/complexity $\to$ fits well to seen data, i.e. training data
High variance
Cannot generalize well onto new data, so performs poorly on unseen data, i.e. test
- definition of Variance (errors): Amount that the estimates (in our case the parameters w) will change if we had different of training data (but still drawn from the same source).
A good model
Uses the “right” capacity / complexity to model the data and can generalize to unseen data.
Strikes a balance between under-and over-fitting, as well as bias and variance.
Because bias and variance derived from the same factor(model capacity), we cannot have both low bias AND low variance.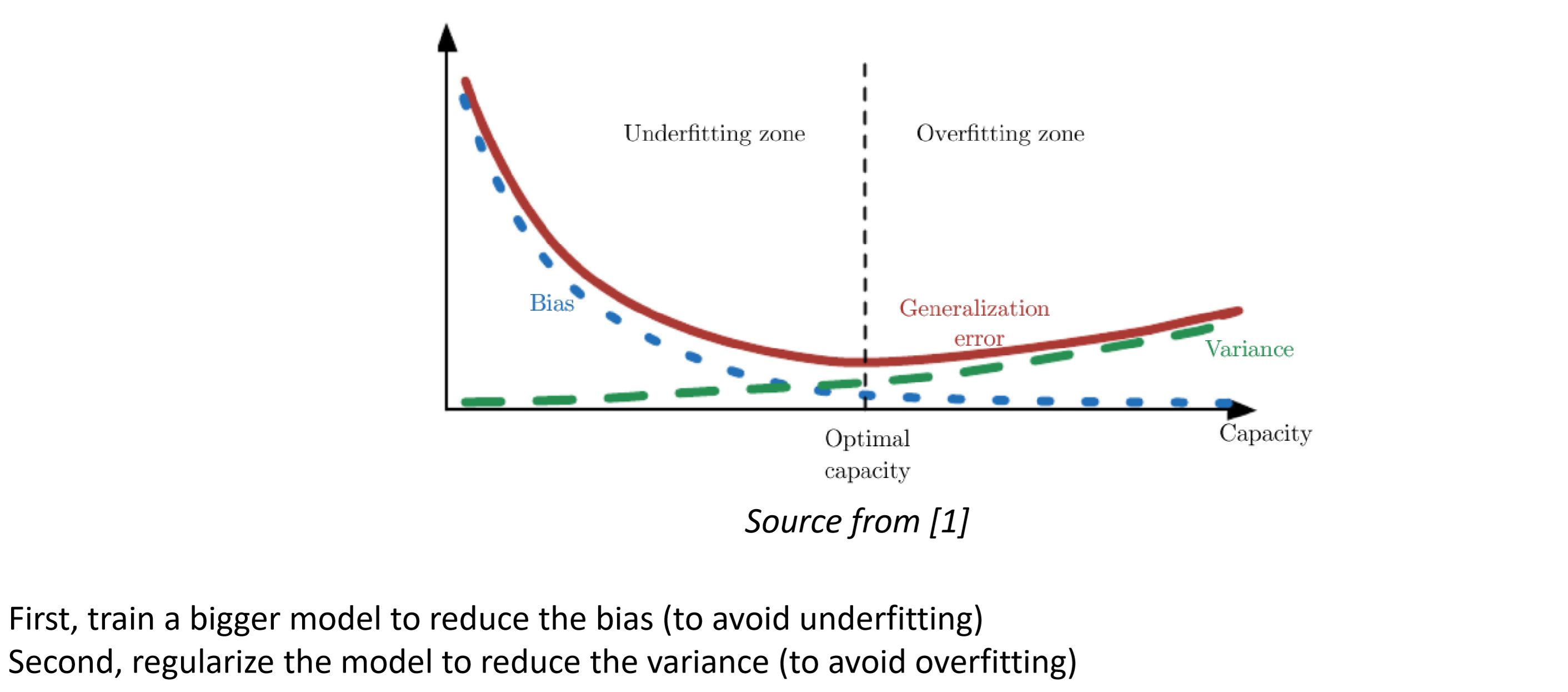
Regularization
Add L2 Norm
$\Phi$ is the flatten vector of all parameters:
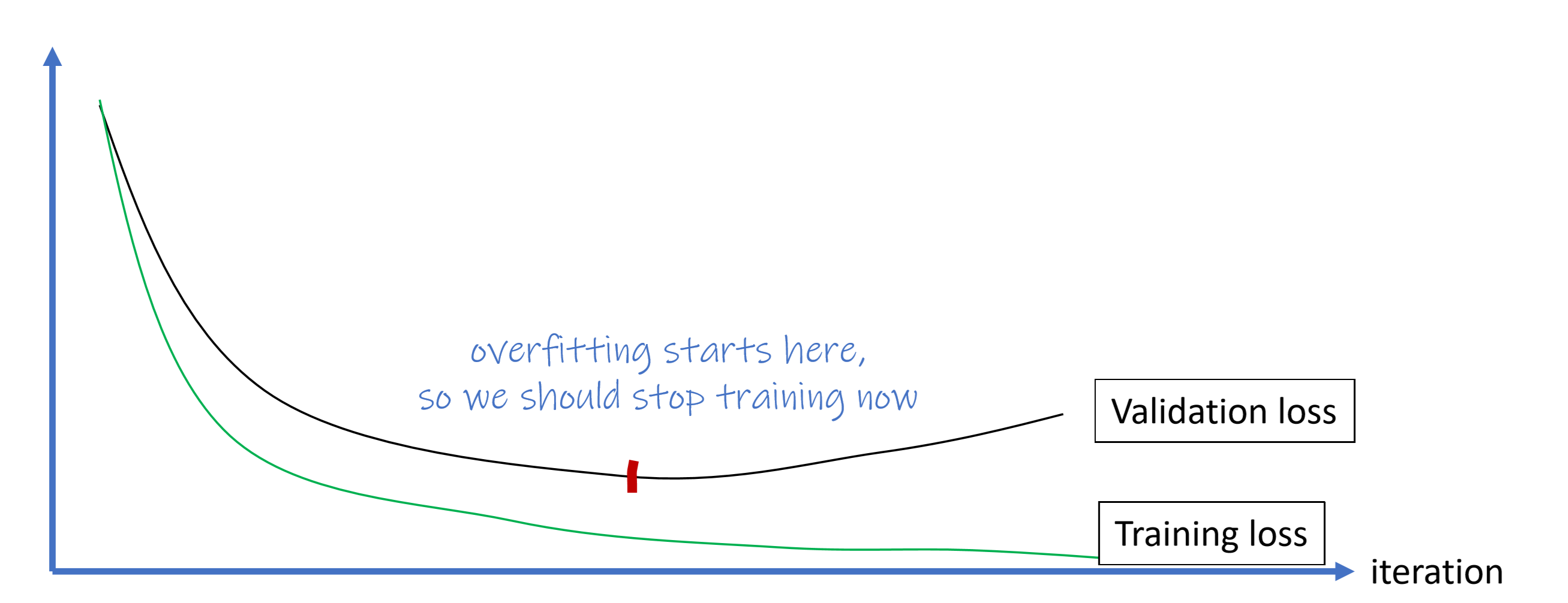
Stop early
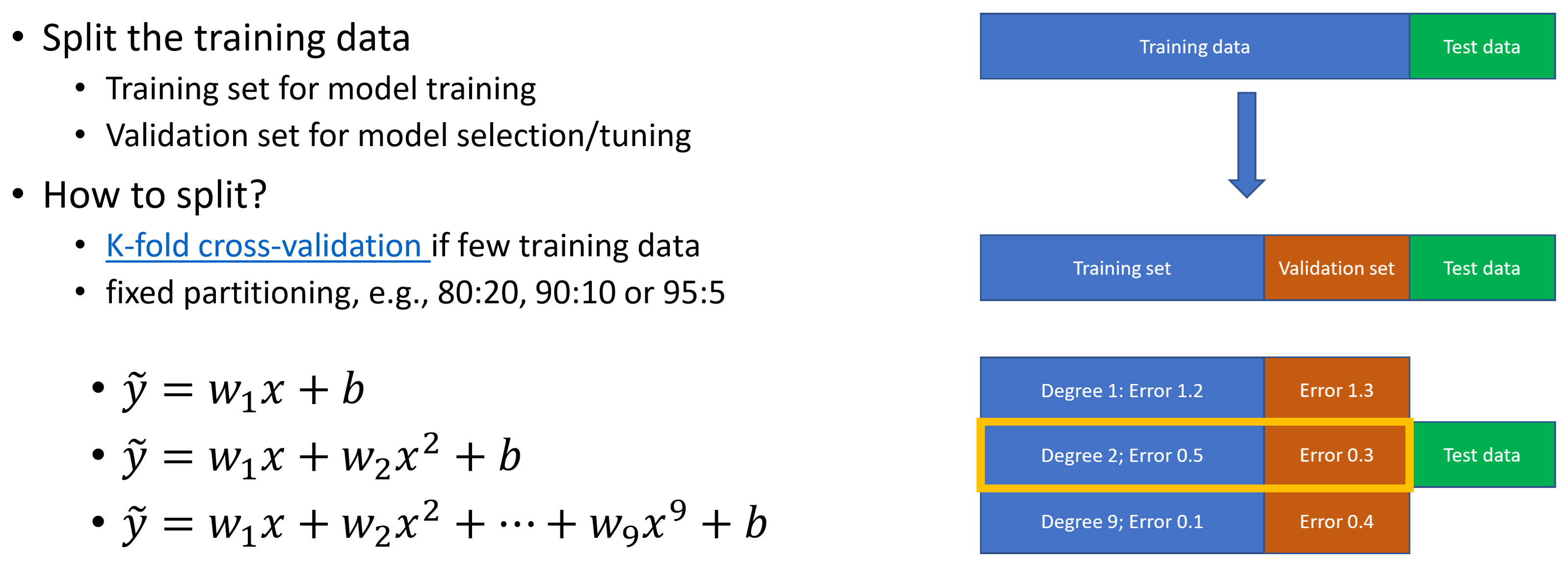
Model tuning and data splitting
Degree is a hyper-parameter or configuration knob.
Tuning the degree is called hyper-parameter tuning or model selection.
For complex models, there could be many such hyper-parameters, e.g. Learning rate of the gradient descent algorithm $\alpha$, Number of layers for a neural network, etc.